 Algorithm
AlgorithmAbstract
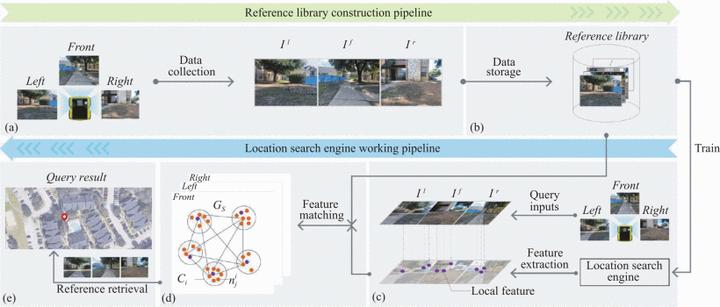
Localization under GPS shadowed areas is an important yet challenging task for field robot operation. In this study, we propose a novel visual localization method for field robots. Our method leverages triangulation views to accurately locate the robot in motion. We use one-stage feature extraction to effectively preserve local features for image representation and use a GMCP with flexible adaptive weights to manage features to triangulate the location prediction. The extensive experimental results indicate that our method is competitive with the existing state-of-the-art approaches and GPS.
Type
Publication
IEEE/CAA Journal of Automatica Sinica
Baijian Yang
Associate Dean for Research and Professor of Computer and Information Technology
My research interests include applied machine learning, big data and cybersecurity.